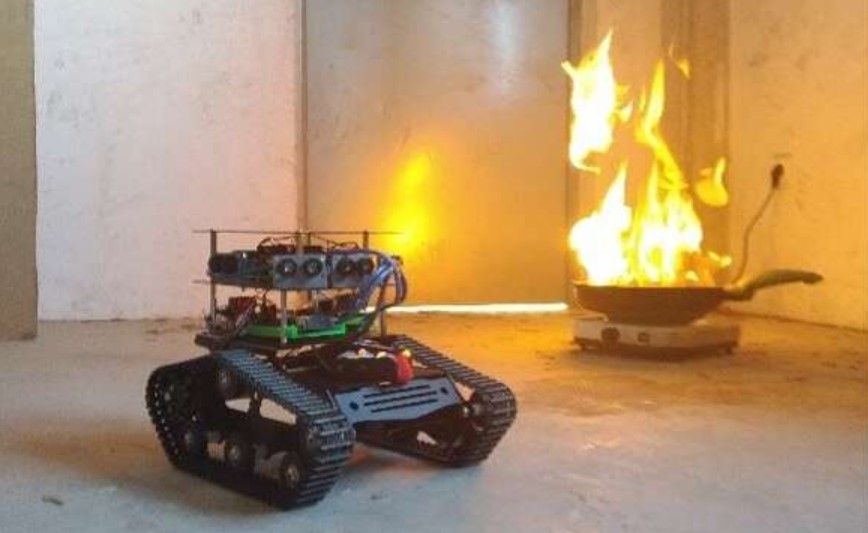
Firefighters can use a robot to assist them during an emergency indoors

As a means of monitoring or intervening in areas that are inaccessible or dangerous for humans, robots could be a valuable tool for most first responders. The assistance of reliable mobile robots would undoubtedly be beneficial to firefighters who are at high risk of injury during their missions.
An autonomous ground robot developed by researchers at the Universidad Rey Juan Carlos and Universidad Autónoma de Madrid could provide firefighters with assistance in dealing with emergencies in indoor settings. According to a study published in the Journal of Field Robotics, fire responders now have access to a system that allows them to better plan their interventions, clearing safe pathways for them to gain access to affected zones and providing support during evacuations.
The work was conducted by Noelia Fernandez Talavera as part of a project called HelpResponder, according to Tech Xplore. HelpResponder aims to reduce the accident rate and mission time of intervention teams, she said. This is accomplished through the use of beacons, drones, and ground robots. As part of a BSc project, the ground robot was designed to acquire environmental parameters in real time for use by emergency response teams.
According to a recent study examining the evolution of fires in Spain, there is a need for new technologies that could assist firefighters more effectively. In these studies, the authors collected data about accidents that occurred to responding agents who were assigned to missions in indoor environments, such as collapses of structures or diseases caused by toxic gas inhalation.

It is evident from these statistics that firefighters should know the environment before intervening, according to Talavera. In order to perform more effective and safe interventions, it is necessary to gather all the information regarding the location of the fires, the presence of harmful gases, and the possible routes.
A robot created by Talavera and her colleagues is capable of monitoring its surroundings and sharing the data it collects with humans. The purpose of this is to measure the temperature, humidity, and air quality of an indoor environment, as well as its position and the position of other objects within that environment. Using a smartphone application, firefighters can access this data remotely from a database.
Depending on the situation, the robot can be operated in three different modes, according to Talavera. Operators can operate the robot remotely by using keyboards, joysticks, or joypads to control speed. By using a graphical interface or a direct view, the robot can also be controlled directly. As a result, the interface must provide sufficient information to maintain their situational awareness, including a scene map, accurate robot location, images of its camera, etc."
Using the robot's second mode of operation, referred to as the autonomous mode, it is capable of exploring an indoor environment independently and avoiding potential obstacles. Using data collected by the integrated sensors, the robot can locate itself, detect obstacles in its surroundings, and navigate through a set of waypoints using a coverage path planning algorithm.
According to Talavera, the robot can offer local information about the environment when it is in autonomous mode. Furthermore, the evacuation mode provides fast and safe routes toward targets. It calculates the shortest path from the present position to the target position based on prior knowledge of the scene. The target location may include the exit of a building or the location of a victim, among other things."
A modular design of the researchers' robot makes it possible to add other components (for example, thermal cameras or other sensors) without altering its core configuration. Furthermore, the robot is compact and consists of components that are affordable. It is therefore capable of reaching areas that are inaccessible to human agents, as well as facilitating its large-scale deployment.
In addition to conducting simulations and real-world trials, Telavera and her colleagues tested their robot in a number of tests. The results were highly promising, since the robot was able to perform various tasks efficiently and autonomously while also avoiding obstacles and providing firefighters with valuable assistance.
As a result of the rugged components of the robot and its high battery autonomy, it was able to carry out multiple missions in a single day during evaluations. Moreover, the team developed simulations of the robot that can assist firefighters in preparing for future interventions in indoor settings, by enabling them to determine the most efficient and safe route to reach a desired location, or simply to practice using the robot.
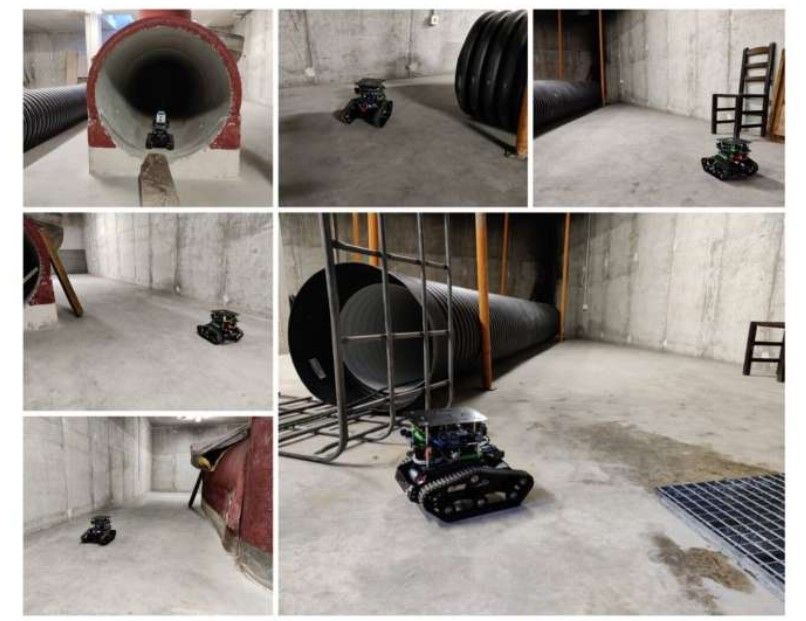
Talavera collaborated with end users during the development of the system and validated it in scenarios that were as realistic as possible. In collaboration with the Alcorcón Fire Department, the prototype was tested at the Unified Safety Center. The results demonstrated the prototype can locate hot and toxic foci within the intervention map under harsh conditions. With the system, firefighters can make quick decisions based on the data obtained and formulate interventions based on the data obtained."
In the near future, other fire departments may be able to use and test the robot created by Talavera and her colleagues. Additionally, it may inspire the development of similar robotic systems to assist other first responders, such as police officers and teams that conduct search and rescue operations.
The next steps is to integrate ROS into the autonomous navigation system and enhance the simulator so that it can reproduce dynamic scenarios in which smoke and fire advance in the same manner as they would in a real-life situation, Talavera commented. We are also developing a web platform that integrates different technologies to provide simultaneous analysis of the data gathered by robots, drones, and beacons. This will simplify the use of the system and make it more valuable in the event of an emergency."
Src: Science X Network
Comments ()