How do you use data annotation for autonomous vehicles?

For autonomous vehicles, data annotation is crucial. They use it to learn how to identify and interact with the environment. It involves the process of labeling data and then using it to train machine learning models. Of course, you can use data annotation for any data. But it is beneficial when training an autonomous vehicle to make decisions on its own.
Data annotation for autonomous vehicles teaches the car what to look for to drive safely. The vehicle needs to know what kinds of things it should look for to identify them as quickly as possible.
Data annotation is a vital part of developing autonomous vehicles. It involves the process of labeling data and then using it to train machine learning models. It aims to have human experts label the data for machine learning algorithms.
Data annotation for autonomous vehicles
So how do you get machines to understand what humans are trying to teach them? This is where data annotation comes into play. You take labeled data and use it as input for an algorithm that will learn what things mean.
Data annotation trains and retrains an ML model for autonomous vehicles. It's a way of marking training data with information about what it contains. This way, the model learns to recognize things the same way a human would. For example, if you have a large dataset containing car images, you can use data annotation to label each image as "car" or "no car." This process helps AI learn more accurately.
Retraining ML models improves their accuracy and usefulness over time. For example, you use data annotation on an autonomous vehicle's GPS. You want it to recognize stop signs as they appear on roads. You'll need someone to identify them in your data set and tag them.
Data annotation tools
Selecting the most suitable data annotation for autonomous vehicles is essential. Consider the following tools for autonomous vehicle data annotations.
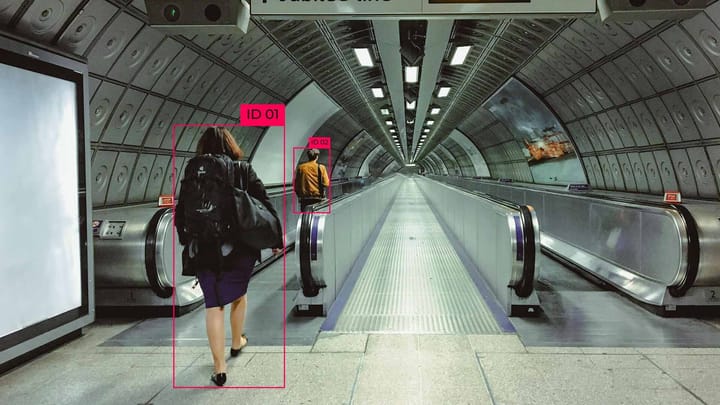
- Bounding box: A bounding box is an area where you want to find objects. It is generally rectangular and defined by four points: two corners and two diagonals.
- Rotating bounding box: This tool allows you to turn the rectangular bounding box to fit perfectly within the object.
- Cuboid annotation: This tool allows you to select irregular shapes within an image rather than just simple rectangles or squares.
- Polygon for lane detection: This tool allows you to create polygons around lanes on roads for machine vision applications related to autonomous vehicles or urban planning.
- Semantic segmentation for object classification: This tool breaks down an image into multiple segments based on semantic meaning, such as whether an object has wheels.
You can use a few different types of annotations, depending on what kind of data you're working with and what you want to do with it.
Training ML models for autonomous vehicles using data annotation
When you are training an autonomous vehicle, you will need to provide it with examples of what the correct result would be in certain situations. The more models you give your car, the better it will become at making decisions on its own.
First, it must be able to detect objects around it and make decisions about navigating the road based on what it sees. This means that the vehicle needs to have a way to identify cars and other vehicles, pedestrians, and bike riders. Then it must decide what action to take based on those identifications. For example, if the vehicle sees a pedestrian walking its path, it might slow down or stop entirely until the pedestrian has passed.
The autonomous vehicle should be able to:
- Drive in a variety of weather conditions, including rain, snow, and ice
- Detect other cars and pedestrians in its path
- Manage unexpected events, such as sudden stops or sharp turns
The second process is called object detection and classification—or object recognition. This step is when the vehicle identifies what type of object it has been presented with (i.e., car vs. bike vs. person) to make informed driving decisions based on that information.
Training data for machine-learning models
Data annotation for autonomous vehicles involves collecting training data for machine learning models. It's a critical part of the ML model-building process and can be done manually or automatically, depending on your use case.
You can use deep reinforcement or supervised learning to improve performance. Deep reinforcement learning works by collecting data on how humans interact with the vehicle and modeling it to enable it to make decisions independently.
Another training system is regression analysis. It uses historical data to predict future events based on current conditions. For example, it can help a car recognize what's happening around it and determine which actions to take.
Before autonomous vehicles are safe to drive, they require extensive training in various machine learning processes. Some examples include:
- Object recognition – Detecting and identifying objects in the environment around the vehicle, including other cars, pedestrians, cyclists, animals, and static road signs or traffic lights
- Route planning – Allows the car to determine its location and where it needs to go to complete its journey safely
- Pattern recognition – Recognizing patterns in its environment, such as a stop sign ahead or a pedestrian crossing the street
An autonomous vehicle requires some form of artificial intelligence (AI) to make decisions based on what it's learned over time.
Update your ML model as new types of objects appear
As you get more data, new types of objects may appear in your data. You can add these new classes to the list of already annotated classes in your ML model. If a unique style doesn't have enough training examples, you can create a placeholder for it until more data is available. This will improve its accuracy because it will know what to look for when it sees these objects and make predictions more quickly.
This process is fundamental because it allows you to account for any changes in your training environment over time—like new road signs, traffic patterns, or even new buildings. It also helps you identify potential training data problems, like missing elements or incorrect labeling.
ConclusionDo you want to improve the accuracy of your self-driving car's machine-learning model? Data annotation for autonomous vehicles is an essential part of the machine-learning process. It allows you to use your data and build an ML model for real-world scenarios.


Comments ()